It’s hard to find good resources of electronic components and sensors for your projects, especially if you are just starting hardware hacking. Well, this is at least the way I felt a few months back, so here is my list of best UK based electronics hardware stores online where you can find pretty much everything you need for you next Arduino project.
Cool Components
![]()
www.coolcomponents.co.uk – great resource for Arduino shields, sensors and wireless communication hardware.
Robot Bits

www.robotbits.co.uk – wheels, chassis, gearboxes and various robotic kits ready for you to assemble based on Arduino.
Oomlout
![]()
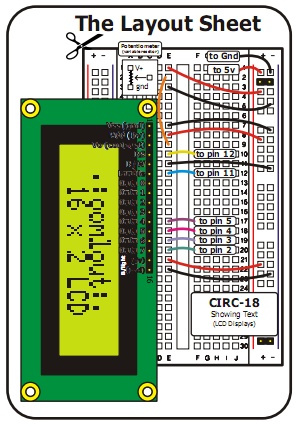
oomlout.co.uk – great store for Arduino stuff, value starter bundles, essential tools, outstanding customer service and prompt delivery. With every component purchased you will get a very nice bonus – printed schematic for breadboard with instructions on how to connect the component to Arduino like this one.
Rapid Online
![]()
www.rapidonline.com – if you are more a do-it-yourself guy, this is an ideal resource for you. Store features everything from microcontroler ICs, LEDs to discrete semiconductors, sensors, gearboxes and complete robotic kits. Very competitive prices and free shipping for orders over £40.
I’d be very happy to hear of any resources that you know in the comments. :)

{kind=link}